Теория автоматического управления. Лекция 3: Математическое описание автоматических систем управления
- Теория автоматического управления. Лекция 3: Математическое описание автоматических систем управления
- 2.2. ЛИНЕАРИЗАЦИЯ
- 2.3. ПРЕОБРАЗОВАНИЕ ЛАПЛАСА И ЕГО ОСНОВНЫЕ СВОЙСТВА
- 2.4. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ЗВЕНА
- 2.5.ТИПОВЫЕ ВОЗДЕЙСТВИЯ
- 2.6. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ САУ
- 2.7. ТИПОВЫЕ ЗВЕНЬЯ И ИХ ХАРАКТЕРИСТИКИ
- Элементарные неминимально-фазовые звенья
- КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАЧИ К ГЛАВЕ 2
Таблица 2.1
Элементарные неминимально-фазовые звенья
|
Передаточная функция W |
Выражение ФЧХ |
График ЛФЧХ |
|
1 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
2.7.2. Интегрирующие звенья
Идеальное интегрирующее звено
Уравнение и передаточная функция
![]() ,
,
или при нулевых начальных условиях
 (2.48)
(2.48)
Частотная передаточная функция
![]() . (2.49)
. (2.49)
Частотные характеристики
![]() .
.
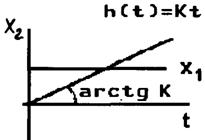
Переходная характеристика
![]()
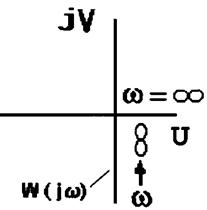
АФЧХ (рис.2.28,а) интегрирующего звена совпадает с отрицательной мнимой полуосью.
|
|
|
|
|
а |
б |
в |
|
Рис. 2.28 |

Логарифмическая амплитудная частотная характеристика (рис.2.28,б) имеет вид
![]() . (2.50)
. (2.50)
Отметим, что на частоте w=1 ЛАХ ![]() , а на частоте
, а на частоте ![]() ЛАХ пересекает ось частот, так как
ЛАХ пересекает ось частот, так как ![]() .
.
ЛАХ интегрирующего звена имеет наклон -20 дБ/дек. Для построения ЛАХ линию с таким наклоном проводят либо через точку с абсциссой w=1 и ординатой ![]() , либо через точку с абсциссой
, либо через точку с абсциссой ![]() и ординатой
и ординатой ![]() .
.
ФЧХ не зависит от частоты, и фазовый сдвиг равен -90° на всех частотах. Переходная характеристика h(t) представляет собой прямую, проходящую через начало координат с угловым коэффициентом наклона ![]() (рис.2.28.в).
(рис.2.28.в).
|
Рис. 2.29 |
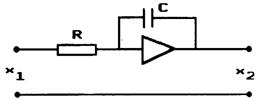
Примером интегрирующих звеньев могут служить двигатели, если выходной величиной является угол поворота вала; операционный усилитель в режиме интегратора (рис.2.29).
![]()
Инерционное интегрирующее звено
Уравнение и передаточная функция звена:
![]() (2.51)
(2.51)
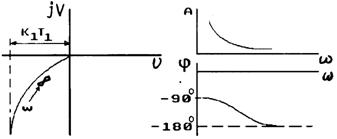
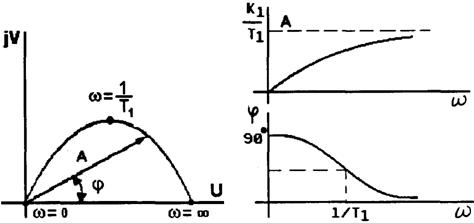
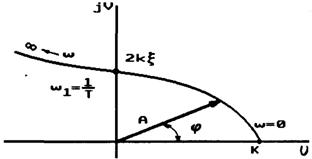
Амплитудно-фазовая частотная характеристика (рис.2.30) 
![]()
|
Рис. 2.30 |
ВЧХ и МЧХ имеют вид
![]() ,
,
Из выражений ВЧХ и МЧХ следует, что при
![]() .
.
|
Рис. 2.31 |
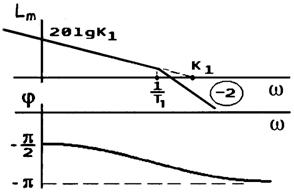
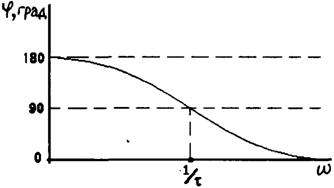
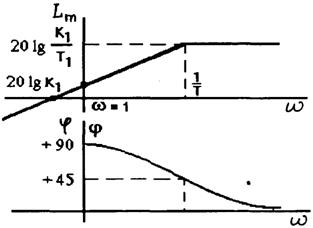
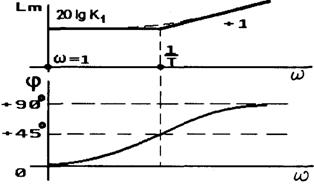
ЛАЧХ описывается выражением
![]()
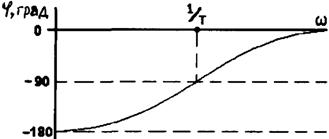
Асимптотическая ЛАЧХ и ЛФЧХ звена представлены на рис.2.31.
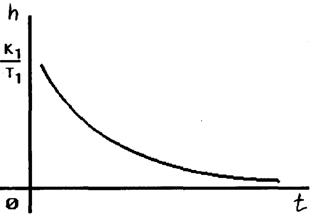
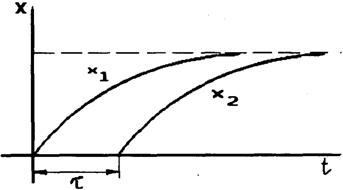
Переходная функция как решение уравнения звена имеет вид
![]()
и изображена на рис.2.32.
|
Рис. 2.32 |
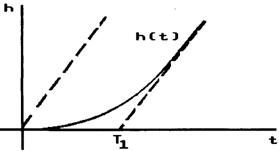
Из рисунка видно, что за счет постоянной времени![]() , вместо идеального интегрирования, здесь
, вместо идеального интегрирования, здесь
получается интегрирование с инерционным запаздыванием. Примером инерционного интегрирующего звена может служить электродвигатель при учете электромеханической постоянной, если выходной величиной считать угол поворота вала двигателя.
Следует обратить внимание на следующую важную особенность позиционных и интегрирующих звеньев: асимптоты ЛАЧХ этих звеньев в области высших частот имеют отрицательные наклоны, крутизна которых определяется порядком полинома знаменателя передаточной функции звена; фазовые сдвиги, вносимые этими звеньями, также отрицательны.
2.7.3. Дифференцирующие звенья
Идеальное дифференцирующее звено
Уравнение и передаточная функция звена
![]() (2.52)
(2.52)
Амплитудно-фазовая частотная характеристика (рис.2.33.а)
![]()
Идеальным такое звено называют потому, что степень полинома числителя передаточной функции (m=1) больше степени полинома знаменателя (n=0), что, в свою очередь, свидетельствует о бесконечно большом усилении (![]() ) в области высоких частот (
) в области высоких частот (![]() ), что в реальных звеньях физически невозможно.
), что в реальных звеньях физически невозможно.
В реальных системах такой вид характеристики звена возможен лишь в ограниченной полосе частот.
|
а б в Рис. 2.33 Частотные характеристики идеального дифференцирующего звена |
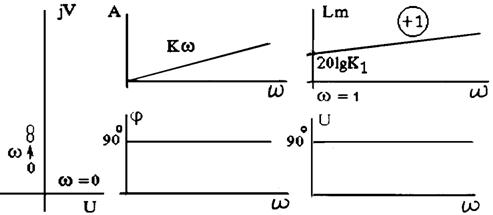
Логарифмические частотные характеристики (рис.2.33,в)
![]()
Для построения ЛАХ линию наклоном +20 дБ/дек проводят через точку![]() на частоте
на частоте ![]() либо через точку
либо через точку ![]() на частоте
на частоте ![]()
Переходная функция представляет собой d - функцию:
![]()
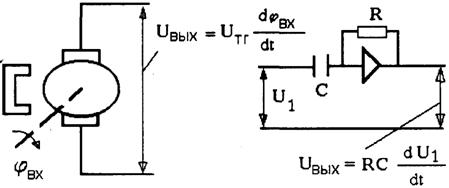
Примером такого звена может служить тахогенератор (рис.2.34,а) — маломощный электрогенератор, выходное напряжение ![]() которого пропорционально угловой скорости вращения якоря (производной угла поворота якоря
которого пропорционально угловой скорости вращения якоря (производной угла поворота якоря ![]() ) или дифференцирующий операционный усилитель (рис.2.34,б).
) или дифференцирующий операционный усилитель (рис.2.34,б).
Еще раз подчеркиваем, что дифференцирующими свойствами эти устройства обладают в ограниченной полосе частот, где пренебрежимо мало влияние инерционных составляющих передаточных функций звеньев.
|
а б Рис. 2.34 |
Инерционное (реальное) дифференцирующее звено
Уравнение и передаточная функция звена
![]() (2.53)
(2.53)
Амплитудно-фазовая частотная характеристика (рис.2.35.а) звена
![]()
|
Рис. 2.35 Частотные характеристики реального дифференцирующего звена |
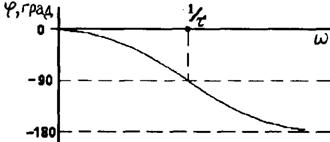
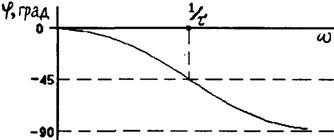
Логарифмические частотные характеристики (рис.2.36)
![]()
Переходная функция (рис.2.37)

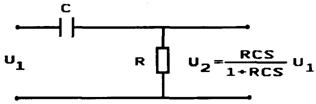
Примером такого звена может служить дифференцирующая R-C цепь (рис.2.38).
|
Рис. 2.36 |
Рис. 2.37 |
|
Рис. 2.38 |
Форсирующее звено (идеальное звено с введением производной)
Форсирующим звеном первого порядка называют звено, которое описывается уравнением
![]()
Передаточная функция
![]() (2.54)
(2.54)
Это звено так же, как и апериодическое характеризуется двумя параметрами: постоянной времени ![]() и передаточным коэффициентом
и передаточным коэффициентом ![]()
Частотная передаточная функция (рис.2.39,а)
![]()
![]()
ВЧХ и МЧХ имеет вид
![]()
Уравнение асимптотической ЛАХ форсирующего звена
где ![]() частота сопряжения.
частота сопряжения.
|
а |
б |
|
Рис. 2.39 |
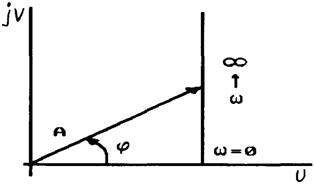
Асимптотическая ЛАЧХ после частоты сопряжения имеет "+l" наклон или +20 дБ/дек.
|
Рис. 2.40 |
ЛФЧХ форсирующего звена можно получить зеркальным отражением относительно оси частот ЛФЧХ апериодического звена и пользоваться теми же номограммой и шаблонами.
Переходная функция (рис. 2.40)
![]() .
.
Форсирующее звено второго порядка
Уравнение и передаточная функция
![]()
![]()
при условии, что ![]() .
.
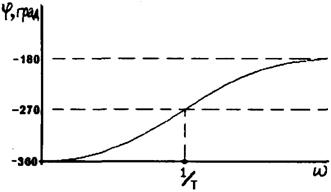
Амплитудно-фазовая частотная характеристика (рис.2.41)
![]()
![]()
![]()
![]()
![]()
|
Рис. 2.41 |
Рис. 2.42 |

Выражения и графики для ЛАЧХ и ЛФЧХ могут быть получены из аналогичных графиков колебательного звена (при тех же значениях,![]() ) путем зеркального отображения относительно оси частот при K=1.
) путем зеркального отображения относительно оси частот при K=1.
Следует отметить, что при частотах, превышающих сопрягающую частоту, ЛАЧХ форсирующего звена второго порядка имеет "+2" наклон или +40 де/дек.
Если ![]() , то передаточная функция этого звена представляется в виде произведения двух форсирующих звеньев первого порядка.
, то передаточная функция этого звена представляется в виде произведения двух форсирующих звеньев первого порядка.
2.7.4. Звено чистого запаздывания
Выходная величина в звеньях чистого запаздывания воспроизводит входную с отставанием по времени (рис.2.43).
Таким звеньям соответствуют объекты с распределенными параметрами, например длинные электрические линии.
|
Рис. 2.43 |
Уравнение звена
![]() (2.56)
(2.56)
где t — запаздывание сигнала во времени
Функцию ![]() можно разложить в ряд Тейлора по степеням t, полагая t малой постоянной величиной и введя замену
можно разложить в ряд Тейлора по степеням t, полагая t малой постоянной величиной и введя замену ![]()
 (2.57)
(2.57)
Сравнивая это выражение с известным рядом
 (2.58)
(2.58)
можно записать (2.56) в операторном виде
![]() (2.59)
(2.59)
Таким образом, передаточная функция запаздывающего звена представляет собой трансцендентную функцию
![]() (2.60)
(2.60)
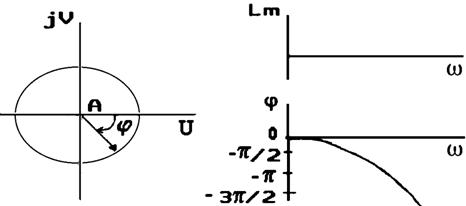
Амплитудно-фазовая частотная характеристика
![]() (2.61)
(2.61)
представляет собой окружность единичного радиуса (рис.2.44,а).
Амплитудно-частотная характеристика ![]() не зависит от частоты, а фазово-частотная характеристика пропорциональна частоте:
не зависит от частоты, а фазово-частотная характеристика пропорциональна частоте:
![]() град.
град.
Следует отметить, что при построении ЛФЧХ необходимо переводить радианную меру в градусную.
ЛАЧХ и ЛФЧХ этого звена приведены на рис.2.44.б. Мы рассмотрели основные типовые звенья, которые входят в состав различных САУ. Знание ЛЧХ типовых звеньев необходимо при построении ЛЧХ систем также, как знание таблицы умножения — при выполнении арифметических действий.
В практике при построении ЛЧХ САУ обычно используют шаблоны ЛЧХ типовых звеньев, приведенные в литературе.
|
Рис. 2.44 |